Automata folyótakarító hajó és a hulladék begyűjtését segítő kamerarendszer támogatja mostantól a Dunának és vízgyűjtő területének megtisztítását. A Robo-Collect nevű vízi jármű és a hozzá kapcsolódó műszaki infrastruktúra magyar ökoinnováció keretében valósult meg. A fejlesztés szemléletében és működésében is újszerű: a szakemberek kiemelten kezelik a hulladék megfigyelését és újrahasznosítását, a folyamatokat innovatív eszközök támogatják, a hulladékgyűjtő rendszer újításai pedig fokozzák a gyűjtés hatékonyságát.
Világviszonylatban és alvízi országként Magyarországon is egyre komolyabb problémát jelent a környezetbe és folyóvizeinkbe kerülő hulladék. Évente világszerte kb. 400 millió tonna műanyagot állítunk elő, amiből nem kevesebb mint 10 millió tonna a tengerekben, óceánokban végzi.

Kutatások igazolják, hogy az óceáni műanyag kb. 80 százaléka a folyókon keresztül éri el az óceánokat. Sőt, egy több mint ezer folyóra kiterjedő kutatás szerint a szárazföldek belsejéből nem a legnagyobb folyamok, hanem nagyvárosokat átszelő kisebb vízfolyások szállítják az óceánokba a legtöbb műanyagot. Ezért is van kiemelkedő jelentősége azoknak a lokális innovációknak, amelyek helyben segítenek a szennyezés automatizált mérséklésén, bevonva ebbe hulladékgyűjtő hajókat.
Robo-Collect - a magyar ökoinnováció
A Tisza Európa egyik legsúlyosabban szennyezett folyója, ami vízügyi adatok szerint nagy áradások idején több mint 500 palackot hoz percenként Ukrajnából és Romániából. Ez éves szinten 10-20 000 tonna hulladékot jelent, aminek megállítására, és kitermelésére már több innováció született. Ezeket a tapasztalatokat is figyelembe véve fejlesztette ki a Future Plastik Kft. és szakmai partnerei azt az integrált rendszert, amely képes a folyón úszó hulladék észlelésére, begyűjtésére és osztályozására. A fejlesztés marketingjében és kommunikációjában a Környezetvédelmi Szolgáltatók és Gyártók Szövetsége (KSZGYSZ) segíti a céget.
A Robo-Collect hulladékgyűjtő hajóval egy kamerarendszerrel, kiemelő szállítószalaggal és hulladékosztályozó rendszerrel ellátott fejlesztés került vízre, segítve a hulladékszennyezés elleni harcot és támogatva az összegyűjtött hulladék újrahasznosítását.
A Tiszai PET Kupa, hazánk legeredményesebb folyami hulladékgyűjtő mozgalma által ihletett berendezéssel a szakemberek szeretnék felhívni a figyelmet a lakossági és ipari eredetű folyószennyezésekre és azok kockázataira, illetve a szennyezések nagy részét kitevő, különféle műanyag hulladék (aquatic plastic) problémájára. A Robo-Collect vízi berendezés 100 százalékban magyar innovációban valósult meg, üzembe helyezésével az elsődleges cél, hogy a hazai folyóvizek és a Duna-vízgyűjtő országai segítséget kapjanak a folyók tisztításában.

A folyószennyezés egyre nagyobb költségeket jelent a vízi infrastruktúra üzemeltetésében, a vízminőség biztosítása során és kockázatot jelent a turisztikai bevételekre nézve is. A költségek és kockázatok csökkentésében segítséget nyújt az új hulladékgyűjtő hajó, és az annak működését támogató hulladékszeparáló, válogató egység, valamint a kamerarendszer.
Miben rejlik a magyar innováció ereje?
Az első hulladékgyűjtő hajók a kétezres években épültek a világban, azóta a nagyobb hulladékgyűjtő szervezetek és mozgalmak folyamatosan fejlesztik saját modelljeiket.
A magyar innováció újszerűsége több olyan tényező fejlesztésében rejlik, amelyet a hulladék megfigyelésébe, összegyűjtésébe, elszállításába, valamint az újrahasznosítás folyamatába építettünk be. A különböző fejlesztési eredményeknek a szakszerű összekapcsolásával pedig megsokszorozódnak az új hulladékgyűjtő hajóban rejlő lehetőségek
- hívta fel a figyelmet az ökoinnovációra Hankó Gergely, a projektben partnerként közreműködő KSZGYSZ ügyvezetője.
A hulladék észlelésében, vagyis a hulladékáradat mozgásának előrejelzésében hidrológiai modell segít, hogy a szakemberek megtalálják azt a helyet, ahol a legjobban eltávolítható a szennyezés.
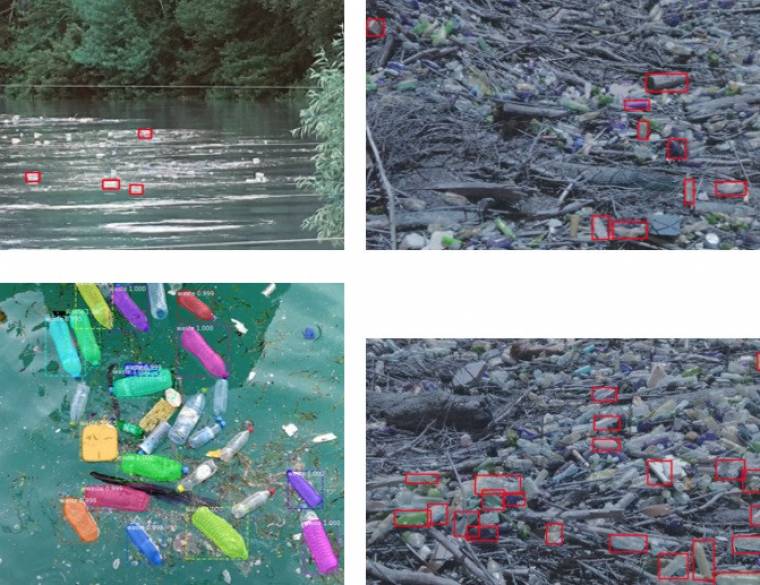
A fejlesztés során sokat foglalkoztunk azzal, hogy miként lehet a folyót és a hulladékot a lehető legjobban megfigyelni. Végül egy öntanuló kamerarendszert fejlesztettünk ki, amellyel akár a hajóról, akár a partról megfigyelve látható mi jön a folyón, így pedig időben be lehet avatkozni és a hulladékáradat továbbjutását, aprózódását megakadályozni
- mondta el az egyik mérföldkőnek számító fejlesztésről Gyalai-Korpos Miklós a Future Plastik Kft. innovációért felelős projektvezetője
A térfigyelő kamerarendszer képeit feldolgozó, újonnan fejlesztett algoritmus lehetővé teszi nagy területek pásztázását és a hulladék felismerését. Ez a számítógépes rendszer a gépi és emberi megfigyelés lehetőségeit egyaránt kombinálja az adatgyűjtésben, az úgynevezett újratanító komponenssel többszöri oda-vissza folyamat pontosítja a megfigyelést, csak ezután küld értesítést a rendszer a hulladék elhelyezkedéséről.
A hajó eszközrendszerének meghajtása autonóm napelemes energiarendszerrel történik. A szemétáradat érkezésekor, a hajó ennek útjába állva, áramlással szemben lehorgonyozva működik és emeli ki a szennyeződést. Működés közben a megtisztítandó, befogott vízfelület egy úgynevezett buborékfal segítségével növelhető meg. Ehhez víz alá helyezett, a hajóról benyúló, perforált csápokba fújnak levegőt és így a létrejött buborékfal a kiszedő gereb (fogas futószalag) irányába tereli a hulladékot. A gereb által kiemelt hulladék válogatásra, majd zsákokba kerül, amelyek egy másik, kisebb vízieszköz segítségével úgy távolíthatóak el a hajóról, hogy annak nem kell elhagynia eredeti munkaterületét. A fejlesztés részeként megépített szeparátornak köszönehetően a hulladék szelektálása akár automatizáltan is működhet.
A fejlesztők reményei szerint a hajó hamarosan munkába áll a hazai folyókon, elsősorban a Bodrogon és a Tiszán, segítve az ottani védekezést. Mivel prototípusról van szó, így az áradások és szemétcunamik alkalmával az éles tesztek bizonyítják majd a hajó használhatóságát és a további fejlesztési lehetőségeket.
A fejlesztés a Nemzeti Kutatási, Fejlesztési és Innovációs Hivatal támogatásával a 2018-1.1.2 - KFI-2018-00034 sz. projekt keretében valósult meg.